![]()
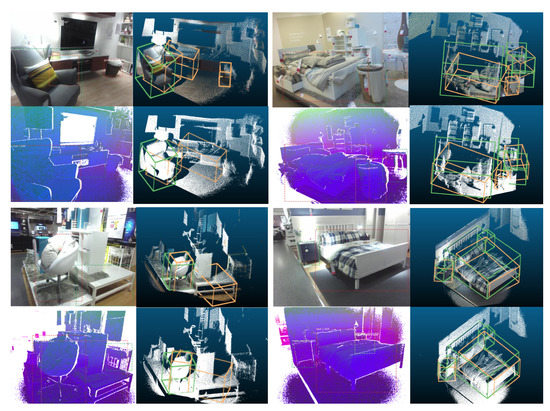
The addition of an instance segmentation module and more
experiments are presented here (Results from SUB RGBD
dataset):

This work was
partially supported by NSF Award CNS1625843 and
Google Faculty Research Award 2017 ("Classification
of urban objects in 3D point clouds").
We acknowledge the support of NVIDIA with the
donation of the Titan-X GPU used for this work.
Finally, support has been provided by CUNY PSC-CUNY
and Bridge funds.