3D/2D Registration
and Photorealistic Modeling
NSF IIS - 0237878: CAREER: Photorealistic 3-D Modeling of Large-Scale Scenes: Integration of 3-D Range and 2-D Intensity Sensing in a Complete System
Additional support provided by: NSF Major Research Instrumentation - Grant No. 021596 (range scanning and computing equipment), PSC-CUNY and CUNY Institute of Softward Design and Development (CISDD) awards.
Ioannis Stamos
- PI
Lingyun Liu - PhD student,
Cecilia Chao Chen - PhD student,
Marius Leordeanu - Undergraduate student,
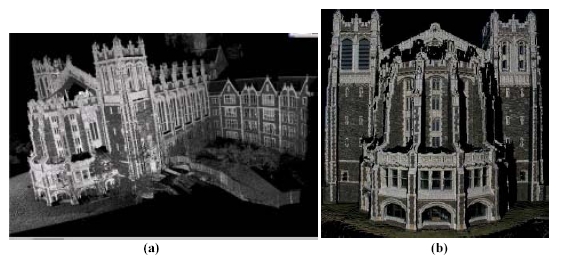
(a) Registered range scans of large urban area. A point-based model is shown. (b) Detail of texture map after automated 3D range to 2D image registration and calibration.

Complete texture-mapped 3D model of urban cite. The locations (white dots) and local coordinate frames (green lines are the orientations) of the 2D cameras are shown as well.
Our goal is the
production of highly accurate photorealistic descriptions of the
3D
world with a minimum of human interaction and increased
computational
efficiency. Our input is a large number of unregistered 3D and
2D
photographs of an urban site. The generated 3D representations,
after
automated registration, are useful for urban planning,
historical
preservation, or virtual reality applications.
A major bottleneck in the process of 3D scene acquisition is the
automated registration of a large number of geometrically
complex 3D
range scans and high-resolution 2D images in a common frame of
reference. We have developed novel methods for the accurate and
efficient registration of a large number of 3D range scans. The
methods
utilize range segmentation and feature extraction algorithms. We
have
also developed a context-sensitive user interface to overcome
problems
emerging from scene symmetry. Finally, we developed a novel and
efficient algorithm for the 3D range to 2D image registration
problem
in urban scene settings. This algorithm calibrates each 2D image
and
computes an optimized transformation between the 2D images and
3D range
scans. A mesh-simplification method of the final 3D model based
on the
segmentation results of each range image has been produced as
well.
Graduate and undergraduate students are being introduced to our
research through the 3D Photography class taught by
the PI.
3D Range to 3D Range Registration
Two novel range-range registration algorithms have been developed. The automated method performs two major functions: scan pair registration and global stitching. This process involves three steps: line clustering, rotation estimation and translation estimation. When the transformations between all pairs are computed and verified by the user a global registration procedure computes the transformation of all other scans with respect to a selected pivot scan.
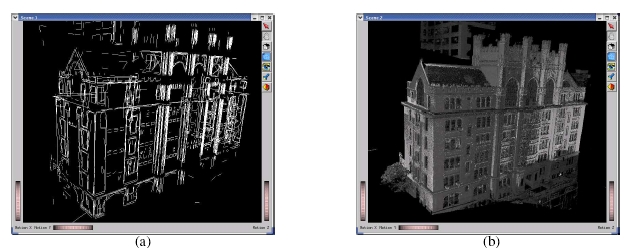
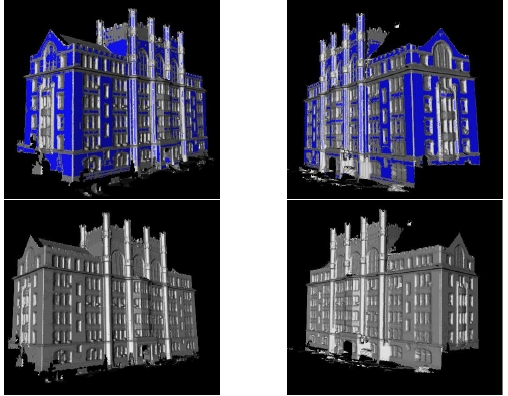
Registered sets of lines and points, Thomas Hunter building NYC.
Representative Publications:
- Automated
Feature-Based
Range Registration of Urban Scenes of Large Scale,Ioannis
Stamos
and Marius Leordeanu, IEEE International Conference of
Computer Vision and Pattern Recognition,
- Range Image Registration Based on Circular Features, C. Chen and I. Stamos, 3rd International Symposium on 3D Data Processing, Visualization & Transmission, Univesity of North Carolina, Chapel Hill, June 14-16 2006. PDF
- Semi-automatic
range to
range registration: a feature-based method, C. Chen
and I.
Stamos, The 5th
International
Conference on 3-D Digital Imaging and Modeling,
- New Methods for Digital Modeling of Historic Sites Using Range and Image Data, P.K. Allen, Ioannis Stamos, Alejandro Troccoli, Benjamin Smith,M. Leordeanu, and Stephen Murray, IEEE Journal of Computer Graphics and Applications, 3D Reconstruction and Visualization of Large Scale Environments, Nov./Dec. 2003, pp. 32-41.
3D Range to 2D Image Registration
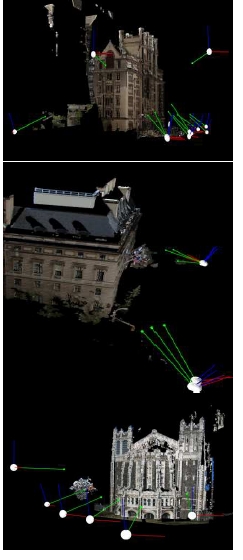
We developed a novel and efficient algorithm for the 3D range to 2D image registration problem in urban scene settings. Our input is a set of unregistered 3D range scans and a set of unregistered and uncalibrated 2D images of the scene. The 3D range scans and 2D images capture real scenes in extremely high detail. A new automated algorithm calibrates each 2D image and computes an optimized transformation between the 2D images and 3D range scans. This transformation is based on a match of 3D with 2D features that maximizes an overlap criterion. Our algorithm attacks the hard 3D range to 2D image registration problem in a systematic, efficient, and automatic way. Images captured by a high-resolution 2D camera, that moves and adjusts freely, are mapped on a centimeter-accurate 3D model of the scene providing photorealistic renderings of high quality.
Camera configurations with respect to a textured-mapped
point-based 3D
scene model.
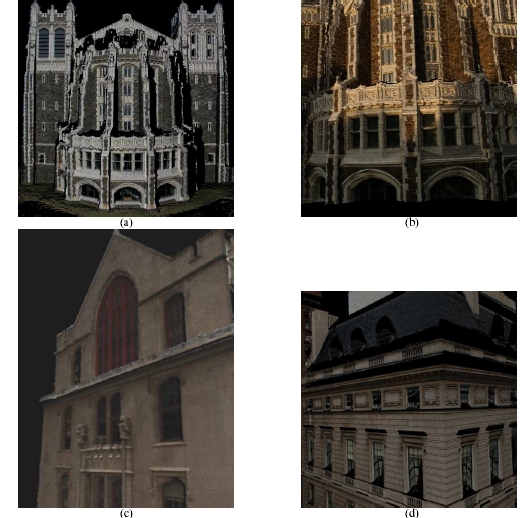
Details of texture-maps for buildings 1 (image c), building 2
(image d)
and building 3 (images a and b) verifies the high accuracy of
the
automated algorithm. Note, that for building 3 we show results
using
images taken under different lighting conditions.
Representative Publications:
- A systematic approach for
2D-image to 3D-range registration in urban environments,
- Integrating Automated Range
Registration with Multiview Geometry for the Photorealistic
Modeling of Large-Scale Scenes,
- A systematic approach for
2D-image to 3D-range registration in urban environments,
- Multiview Geometry for Texture Mapping 2D Images Onto 3D Range Data, L. Liu, I. Stamos, G. Yu,G. Wolberg, S. Zokai, IEEE International Conference of Computer Vision and Pattern Recognition, New York, NY, June 17-22 2006. PDF
- Automatic 3D to 2D Registration for the Photorealistic Rendering of Urban Scenes, L. Liu and I. Stamos, IEEE CVPR 2005 Conference, June 20-26, San Diego, Vol. II, pp. 137-143. PDF
- AutomaticRegistration of 3-D with 2-D imagery in Urban Environments, I. Stamos and P. K. Allen, The Eighth International Conference on Computer Vision, Vancouver, Canada, July 2001, pp. 731–736. PDF
Modeling & Simplification
We developed a mesh-simplification method of the final 3D model based on the segmentation results of each range image. Note, that our simplification method does not depend on the 3D modeling method used. Our goal is to retain the geometric details of the 3D model in areas where planar segmentation is not possible and to simplify the model in areas where planar segments from the segmentation module are available. Our ultimate goal is the automated generation of a scene CAD model. The fact that we are relying on the original segmentation results for simplification increases the accuracy of our algorithms, since the final 3D model may diverge from the original scans due to mis-registrations or averaging.
Representative Publications:
- Geometry and Texture Recovery
of Scenes of Large Scale,
- 3D Modeling Using Planar Segments And Mesh Elements, I. Stamos, G. Yu, G. Wolberg, S. Zokai, 3rd International Symposium on 3D Data Processing, Visualization & Transmission, Univesity of North Carolina, Chapel Hill, June 14-16 2006. PDF
- Efficient Model Creation of Large Structures based on Range Segmentation, Ioannis Stamos and Marius Leordeanu, 2nd International Symposium on 3D Data Processing, Visualization & Transmission, Thessaloniki, Greece, September 2004.