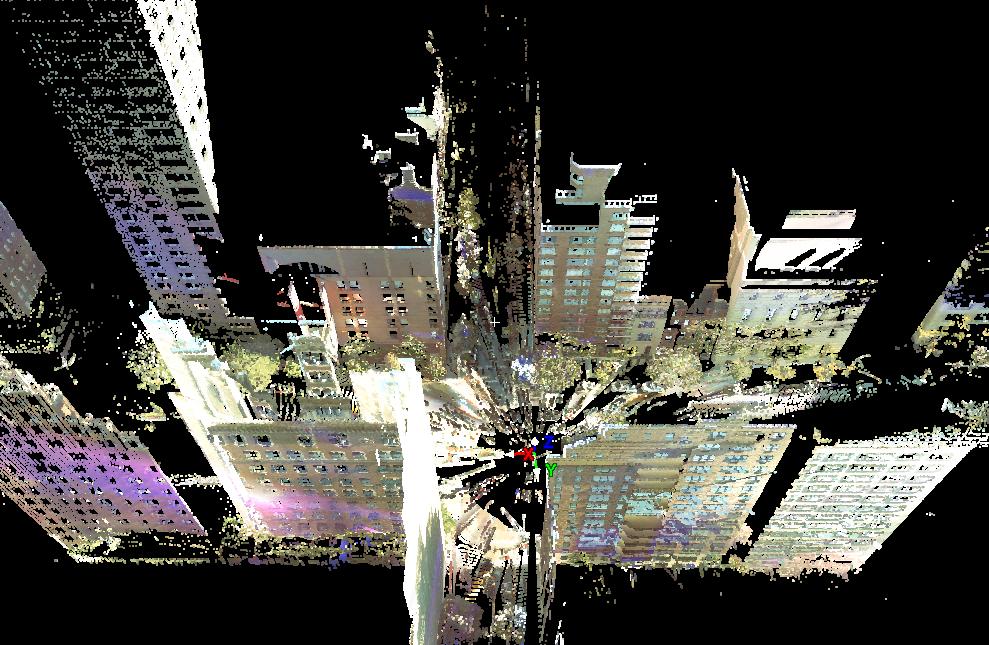
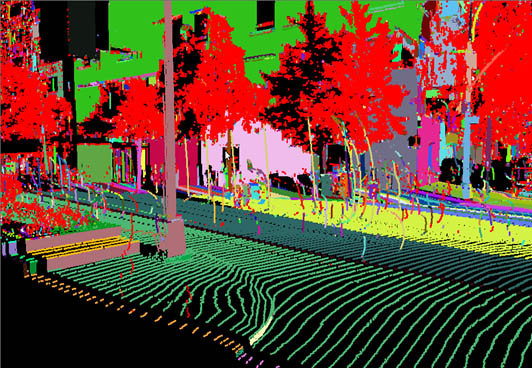
Figure: (a) 3D range scan of
Park Avenue and 70th street (scanner is a the center of the
intersection). Bird's-eye view. Data gathered by the Leica
ScanStation2 of our laboratory. (b) 3D texture-mapped model of
building at CCNY. Camera positions are shown (see IJCV 2008
paper in
publications). (c)
Online classification of objects in urban scene (see 3DPVT
2010 paper).
Course Overview
Recent advances in computer hardware have made possible the
efficient rendering of realistic 3D models in inexpensive
PCs, something that was possible with high end visualization
workstations only a few years ago. This class will cover the field
of 3D Photography -the process of automatically creating 3D
texture mapped models of objects- in detail. We will concentrate on the topics at the
intersection of Computer
Vision and Computer Graphics that are relevant to
acquiring, creating, and representing 3D models of small objects
or large urban areas. Many very interesting research questions
need to be answered. For example: how do we acquire real shapes?
how do we represent geometry? can we detect similarities between
shapes? can we detect symmetries within shapes? how do we register
3D geometry with color images?, etc. Applications
that benefit by this technology include: image retrieval in digital libraries,
image search, face recognition, historical
preservation, urban planning, google-type maps, architecture, navigation, virtual reality,
e-commerce, digital cinematography, computer games, just to name a few.
The core of the class will
be a set of presentations of recent papers along with
introduction of fundamental topics. The research
facilities of the Vision and Graphics Laboratory will become available to
registered class participants. The research of our laboratory is
supported by the
National Science Foundation through three active NSF awards. So,
if you are interested for a research topic, please join the
class!

Course
Format
There will be a weekly class, with presentations by the
instructor. The presentations will introduce the basic concepts
and techniques of the field.
The grade will
be based upon the following:
60% for group/individual projects, 30% for final project and 10%
for class participation.
Prerequisites
Linear algebra, data structures and algorithms,
and C/C++ or Java programming. No prior knowledge of vision
is assumed. Courses such as image processing, computer graphics, and digital tomography are helpful
but are not required for the understanding of the material.
Topics
- Acquiring images: 2D and 3D sensors (digital cameras and laser
range scanners).
- Camera calibration.
- 3D- and 2D- image registration.
- Stereopsis.
- Optical flow.
- Segmentation.
- Geometry: representation of 3D models, simplification of 3D
models, detection of symmetry.
- Photometric Stereo.
- Image based rendering.
- Texture mapping.
Course Material
This class will be based on
recent publications and recent workshops. A set of seminars,
books, and journals are provided for your reference.
Computer
Vision Books:
Computer Vision: Algorithms and Applications, Richard
Szeliski, 2010: Online Version
Introductory Techniques for 3-D Computer Vision.
EmanueleTrucco and Alessandro Verri. Prentice Hall, 1998.
Robot Vision. B. K. P. Horn, The MIT Press, 1998 (12th
printing).
Computer Vision A Modern approach.
David
S. Forsyth, Jean Ponce. Prentice Hall 2003. Some
online content.
Three-Dimensional Computer Vision: A Geometric Viewpoint.
Olivier Faugeras, The MIT Press, 1996.
An Invitation to 3-D Vision. Yi Ma, Stefano Soatto, Jana
Kosecka, S. Shankar Sastry. Springer-Verlag, 2004.
Computer Vision. Linda Shapiro and George Stockman. Prentice
Hall, 2001.
Computer
Graphics Books:
Computer
Graphics, Principles and Practice. Foley, van Dam, Feiner,
and Hudges. Addison-Wesley, 1997.
3D Computer Graphics. Alan Watt. Addison-Wesley,
2000.
OpenGL Programming Guide. Mason Woo, Jackie Neider,
Tom Davis. Addison-Wesley, 1998.
Computer Vision and
Graphics Journals:
International Journal on Computer Vision.
Computer Vision and Image Understanding.
IEEE Trans. on Pattern Analysis and Machine Intelligence.
SIGGRAPH
(http://www.siggraph.org).