Classification Algorithms
This
work has been supported by the following NSF grants:
IIS-0915971, CCF-0916452 and MRI CNS-0821384. This work has been also be supported
by the Google Research Award "Classification of vehicles in
points clouds of urban scenes, as well as from an NVIDIA
equipment grant. Finally, support has been provided by CUNY
PSC-CUNY and Bridge funds.

CNN-based algorithms
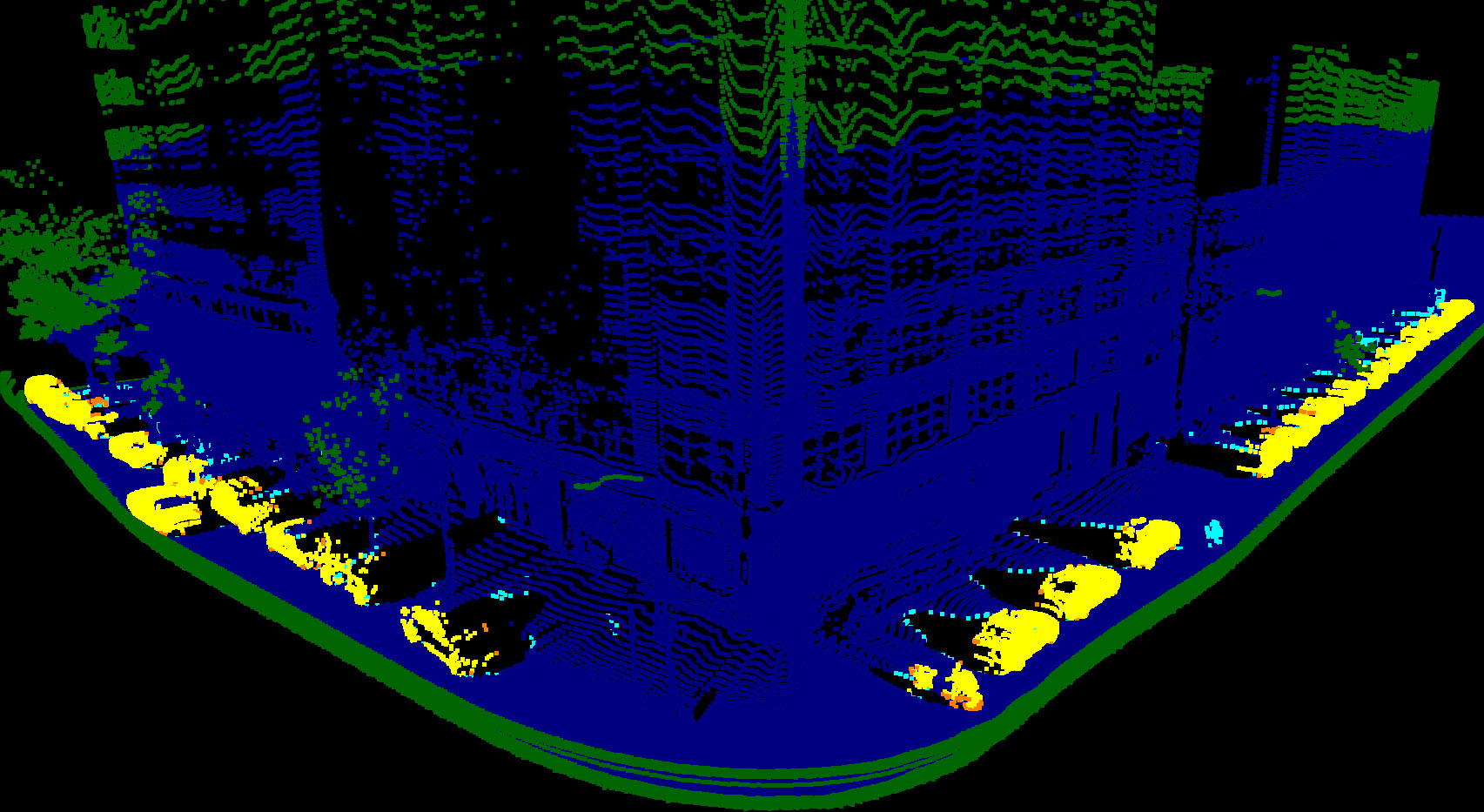
We examine the task of point-level object
segmentation in outdoor urban LIDAR scans. A key challenge in this
area is the problem of missing points in the scans due to
technical limitations of the LIDAR sensors. Our core contributions
are demonstrating the benefit of reframing the segmentation task
over the scan acquisition grid as opposed to considering only the
acquired 3D point cloud and developing a pipeline for training and
applying a convolutional neural network to accomplish this
segmentation on large scale LIDAR scenes. By labeling missing
points in the scanning grid we show that we can train our
classifier to achieve a more accurate and complete segmentation
mask for the vehicle object category which is particularly prone
to missing points. Additionally we show that the choice of input
features maps to the CNN significantly effect the accuracy of the
segmentation and these features should be chosen to fully
encapsulate the 3D scene structure. We evaluate our model on a
LIDAR dataset collected by Google Street View cars over a large
area of New York City.
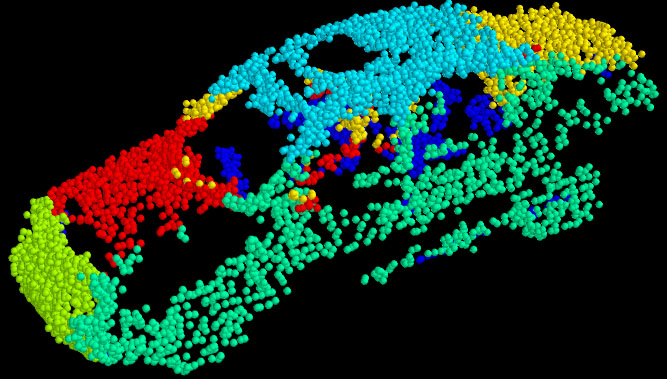
Algorithms based on parts
Unprecedented amounts of 3D data can be acquired in urban
environments, but their use for scene understanding is challenging
due to varying data resolution and variability of objects in the
same class. An additional challenge is due to the nature of the
point clouds themselves, since they lack detailed geometric or
semantic information that would aid scene understanding. In this
paper we present a general algorithm for segmenting and jointly
classifying object parts and the object itself. Our pipeline
consists of local feature extraction, robust RANSAC part
segmentation, partlevel feature extraction, a structured model for
parts in objects, and classification using state-of-the-art
classifiers. We have tested this pipeline in a very challenging
dataset that consists of real world scans of vehicles. Our
contributions include the development of a segmentation and
classification pipeline for objects and their parts; and a method
for segmentation that is robust to the complexity of unstructured 3D
points clouds, as well as a part ordering strategy for the
sequential structured model and a joint feature representation
between object parts.
Online Algorithms
Sequential
Classification in Point Clouds of Urban Scenes
Laser range scanners have now the ability to acquire millions of
3D points of highly detailed and geometrically complex urban
sites, opening new avenues of exploration in modeling urban
environments. In the traditional modeling pipeline, range scans
are processed off-line after acquisition. The slow sequential
acquisition though is a bottleneck. The goal of our work is to
alleviate this bottleneck, by exploiting the sequential nature of
the data acquisition process. We have developed novel online
algorithms, never before used in laser range scanning, that
perform data classification on-the-fly as data is being acquired.
These algorithms are extremely efficient, and can be potentially
integrated with the scanner’s hardware, rendering a sensor that
not only acquires but also intelligently processes and classifies
the scene points. This sensor, armed with the proposed algorithms,
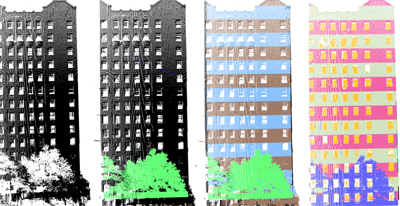
can classify 3D points in real-time as being in vegetation vs.
non-vegetation regions, or in horizontal vs. vertical regions. The
former classification is possible by the implementation of
sequential algorithms through a hidden Markov model (HMM)
formulation, and the latter through the use of a combination of
cleverly designed sequential detection algorithms. We envision an
arsenal of algorithms of this type to be developed in the future.
- Sequential
Classification in Point Clouds of Urban Scenes, O.
Hadjiliadis and I. Stamos, Fifth International Symposium on 3D Data Processing, Visualization and
Transmission, Paris,
France, May 17-20, 2010 PDF.
- Online
algorithms for classification of urban objects in 3D point
clouds, I. Stamos, O. Hadjiliadis, H. Zhang and T.
Flynn, 2012, The second 3DIMPVT
(3D Imaging, Modeling, Procession, Visualization and
Transmission) Conference, ETH, Zürich, Oct. 13–15, 2012, PDF.
- Online classification in 3D
urban datasets based on hierarchical detection�, T. Flynn,
O. Hadjiliadis and I. Stamos, International Conference on 3D
Vision (3DV 2015), October 19 - 22 2015, Lyon, France. PDF.
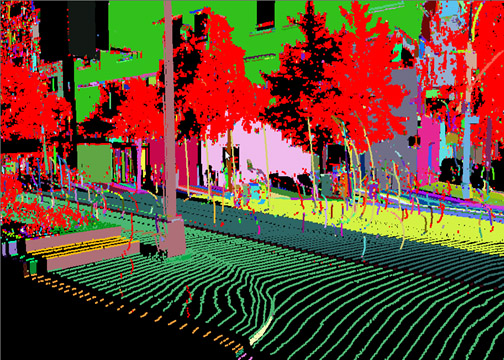
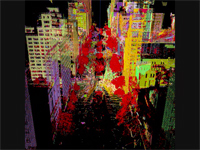
 Video of classification
results (low resolution). 8 scans ~ 21 million points. Park Avenue
(68th to 70th street). Red: vegetation, green: horizontal, blue:
vertical. For high resolution click
here.
Video of classification
results (low resolution). 8 scans ~ 21 million points. Park Avenue
(68th to 70th street). Red: vegetation, green: horizontal, blue:
vertical. For high resolution click
here.
 Video of region-growing results (low resolution).
8 scans ~ 21 million points. Park Avenue (68th to 70th street).
Red: vegetation, other colors: connected components. For high resolution click
here.
Video of region-growing results (low resolution).
8 scans ~ 21 million points. Park Avenue (68th to 70th street).
Red: vegetation, other colors: connected components. For high resolution click
here.
Real Time Detection of Repeated
Structures in Point Clouds of Urban Scenes

Laser range scanners provide rich 3D
representations of urban scenes. These scenes are replete with
repetitive architectural features such as windows, balconies, and
cornices. Processing of dense 3D images is often computationally
intensive and occurs offline after acquisition. Here, however, we
present an online algorithm for the detection of repetitive
features in 3D range scans. Our algorithm creates a function from
each scanline by deriving a local measure at each point. Computing
the Fourier transform of that function reveals the periodicity of
the scene. This robust algorithm forms the basis for novel methods
of feature extraction, compression, and registration. What is more
this whole process can be executed on-the-fly and integrated into
hardware transforming laser scanners into architecture aware
devices.
- Online Detection of
Repeated Structures in Point Clouds of Urban Scenes for
Compression and Registration, S. Friedman and I.
Stamos, International Journal of Computer Vision (Special
Issue: 3D Imaging, Processing and Modeling), Volume 102,
Issue 1-3, pp 112-128, March 2013. Online version here
(DOI 10.1007/s11263-012-0575-y). Local copy (PDF) -- do not
redistribute.
- Real Time Detection of
Repeated Structures in Point Clouds of Urban Scenes,
S. Friedman and I. Stamos, The First Joint
3DIM/3DPVT (3DIMPVT) Conference, Hangzhou, China, May
16-19, 2011 PDF.
Online Facade Reconstruction
from Dominant Frequencies
We present an online method for
filling holes in point clouds by exploiting the regularity of
urban areas. Sweeping a plane across the scene we compute
periodicity, major planes, and occlusions. Extending rays from
the laser that have been occluded gives a planar approximation
for holes in facades. The periodicity of the architecture is
used to vastly improve this approximation yielding facades
that seem complete and natural. Both abstract and high
resolution mesh data is constructed from the improved point
clouds. All this processing is performed online allowing for
seamless integration with scanner hardware.
Offline Algorithms For
Repetition Detection in 3D
Detection of Windows
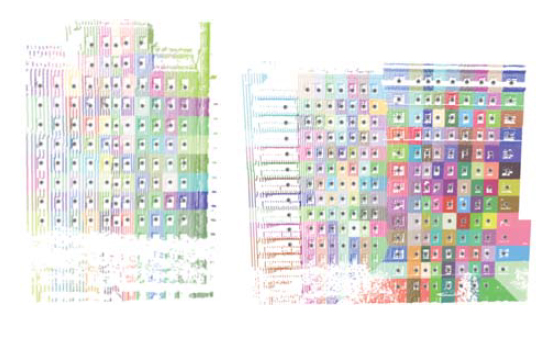
In this paper, we describe
novel algorithms for the detection of windows, which are
ubiquitous in urban areas. Detecting isolated windows is a
challenging problem due to the inability of the laser range
sensors to acquire any data on transparent surfaces and due
to the wide variability of window features. Our approach is
based on the assumption that the elements (windows) are
arranged in multiple unknown periodic structures making our
system robust to single window detection errors. This kind
of detection is essential for high-level recognition
algorithms, compression methods, registration, as well as
realistic visualizations.